Mission Planner Mat File

Weekly Planners Eps Weekly Planner Template Weekly Planner Planner Template
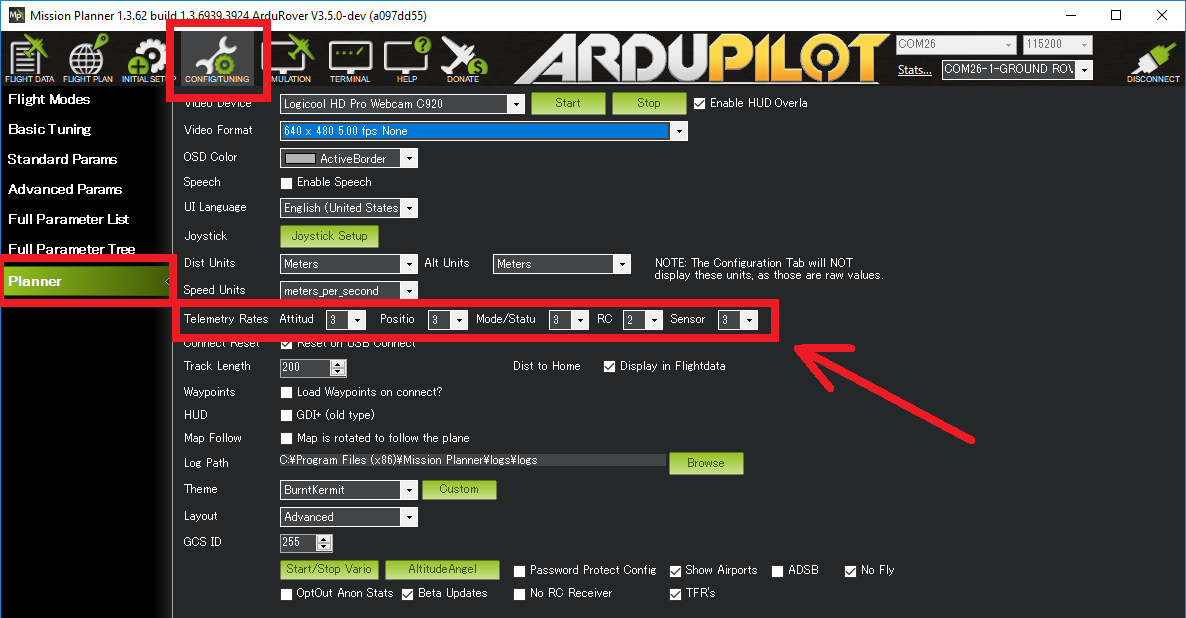
Telemetry Logs Mission Planner Documentation

Daily Digital Planner Horizontal Layout Work Planner Printable Bullet Journal Ipad Planner In 2020 Digital Planner Work Planner Planner

Event Planning Spreadsheet Template In 2020 Event Planning Calendar Event Planning Spreadsheet Corporate Event Planning

First Half Of The Week Afterthepen In My Classichappyplanner Hope Everyone Is Having A Great Week Happy Planner Happy Planner Layout Washi Tape Planner

Strategic Plan Template Excel Beautiful Simple Marketing Plan Template Fr In 2020 Digital Marketing Plan Template Simple Business Plan Template Marketing Plan Template

Mission planner is normally installed in the c program files x86 mission planner folder.
Mission planner mat file.

Human Resource Management Business An Hr Report Ans Project Regarding Hr Management Report Template In 2020 Resource Management Human Resource Management Hr Management

Diy Planner Dashboard Diy Planner Planner Dashboard

Pto Today Meeting Minutes Outline Pto Meeting Pta School Pto Today

Special Education Cover Letter Examples Cover Letter For Resume Cover Letter Template Business Plan Template

6 Items To Simplify Your Life Folder Organization Problem Solving Wedding Planner Office Space
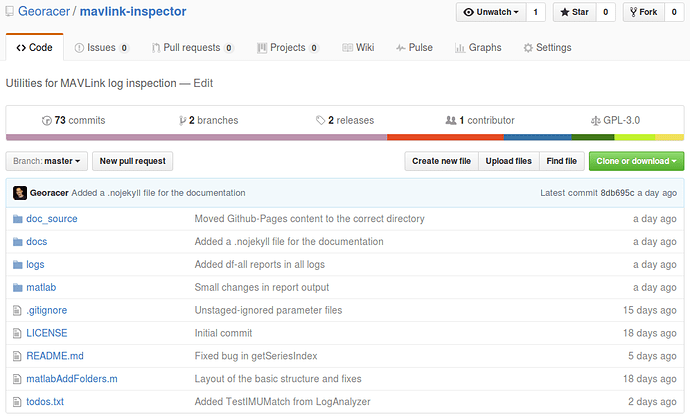
Mavlink Inspector Matlab Dataflash And Mavlink Log Diagnostics For Fixed Wing Airplanes Blog Ardupilot Discourse

Ice Inference Anchor Lesson Game Mat Foldable Inference Lesson Foldables

Online Event Planning Checklist Event Planning Timeline Fundraising Event Planning Event Planning Template

Pin On Cricut Vinyl

Your Story Company Profile Business Writing Tender Documents Social Media Brochure Material Website Mat Business Writing Company Profile Website Branding

25 Cover Letter For Project Manager Cover Letter Templates Website E Card Ide Dekorasi

Strategic Account Planning Template Awesome Microsoft Word And Excel 10 Business Plan T In 2020 Business Plan Template Business Plan Template Word Action Plan Template

Free Strategic Plan Template Inspirational 32 Sales Plan Sales Strategy Templ In 2020 Strategic Planning Template Sales Strategy Template Business Plan Template Free

Starting An Etsy Shop Free Printable Shop Planner Business Planner Printables Business Printables Planner Printables Free

Tips For How To Enjoy Deep Cleaning Your House A Free Whole House Cleanin House Cleaning Checklist Printable Deep Cleaning Checklist House Cleaning Checklist

Plain Text Resume Example New 4 Sample Plain Text Resume Zmibid In 2020 Event Planning Quotes Cover Letter Template Business Plan Template

Personal Marketing Plan Template New Willette Marchany S Personal Marketing Plan Ppt Video In 2020 Personal Marketing Plan Marketing Plan Template Personal Marketing

Personal Strategic Plan Examples New Personal Strategic Planning In 2020 Business Plan Template Word Marketing Plan Template Strategic Planning
3

A Marketing Timeline Lets You View The Chronology Of Your Marketing Plan Over Time From Objectives Event Planning Timeline Marketing Budget Campaign Planning

Updated Homeschool Attendance Forms Homeschool Attendance Homeschool Attendance Records Curriculum Planner

Simple Business Plan Template Pdf New Simple Business Plan Template Pdf In 2020 Simple Business Plan Template Business Plan Template Pdf Business Plan Template

Beyondprincess Digital Photo File Organization Tips Digital File Organization Organization Hacks Digital Organization

2 Free Guides For Your Personal Development Plan Personal Development Plan Template Personal Development Plan Personal Improvement Plan
Source : pinterest.com
